首页能源头条推荐资讯详情
基于改进分布式拥塞控制的风电场有功功率调度方法
发布者:
来源:


01
模型构建
1.1 风电机组数学模型
根据贝兹理论,风轮的风能捕获功率Pa为

式中: ρ为空气密度;R为风轮半径;v为风速;CP(λ,β)为风能利用系数;λ为叶尖速比,是风轮叶尖线速度与风速的比值,λ=ωR/v,ω为风轮转速;β为桨距角。
风能利用系数CP(λ,β)是关于叶尖速比λ和桨距角β的函数,在叶尖速比λ一定的情况下,CP随着桨距角β增大而减小,因此为了获得最大的风能利用系数,通常令风电机组的桨距角β保持为0,仅在风电机组转速超过额定转速时开始增加以保证风电机组实际转速不超过额定转速,保证风电机组安全运行。本文中,将风能利用系数设置为

在最大功率点跟踪(maximum power point tracking,MPPT)控制阶段,桨距角β始终保持不变,风能利用系数Cp是叶尖速比λ的函数。在此阶段,当叶尖速比λ达到最佳叶尖速比λopt时,对应风能利用系数达到最大值
此时,风电机组以最大效率捕获风能。结合式(2)(3)可以得到风电机组在MPPT运行状态下的最优功率为

本文中,风电机组在设计的控制算法启动前会在MPPT模式下运行。
风轮的气动转矩和风能捕获率的关系为

式中:ωr为转子转速;Tr为风轮的气动转矩。
由此可得

风电机组的传动链模型由风轮、发电机转子和齿轮箱3个部分组成,风轮侧和发电机侧分别为低速侧和高速侧,如图1所示。

图1 风电机组传动链模型
Fig.1 Wind turbine drive chain model
基于风电机组传动链模型的动态数学方程为
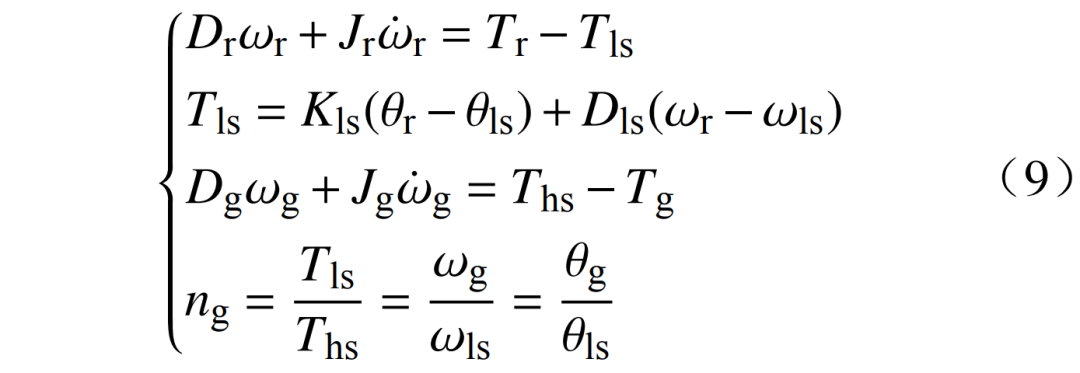
式中:Dr为风轮的外阻尼;Dg为发电机的外阻尼;Dls为低速轴扭转的阻尼系数;Jr为风轮的转动惯量;Jg为发电机的转动惯量;Tls为低速轴的转矩;Ths为高速轴的转矩;Tg为发电机的电磁转矩;Kls为低速轴扭转的刚度;θr−θls为风轮和低速轴之间的扭转角度;ωls为低速轴的转速;ωg为发电机的转速;ng为齿轮箱变速比。
1.2 风电机组的变桨距控制策略
MPPT算法是风力发电系统中常用的一种控制方法,其核心思想是通过实时调整风电机组的叶尖速比等运行参数,使风电机组工作在最大功率点上。风电场最初工作在MPPT模式,在此模式下,风电机组的桨距角β始终恒定,随着风速增大,风电机组转速和功率逐渐增大,然而风电机组的转速存在着物理极限,达到转速的最大值后,当风速继续增大时,为了调整风电机组的风能捕获功率,需要进行变桨距控制。变桨距指的是安装在轮毂上的叶片通过控制可以改变其桨距角的大小。同时,变桨距控制对于高风速下保持风电机组转速稳定也发挥着重要作用。典型的变桨距控制模型如图2所示。
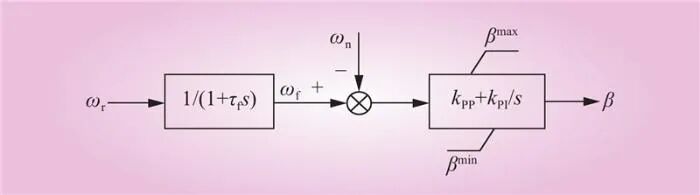
图2 典型变桨距控制模型
Fig.2 Typical variable pitch control model
图2中:ωf为经过滤波后的转子转速;ωn为转子额定转速;βmax和βmin分别为桨距角的上下限;τf为一阶惯性环节的时间常数;kPP和kPI分别为比例积分控制器的参数,随着桨距角β变化进行调整。在变桨距控制中,对转子转速ωr进行滤波,得到ωf,与额定转速比较之后,得到转速偏差值,经过PI控制器输出桨距角。
变桨距控制系统主要采用比例积分控制器,根据发电机有功功率输出和风轮转速反馈来调节桨距角β。在MPPT控制的基础上,将桨距角调节引入风电机组的全风速段的功率控制,通过变桨距控制系统对风电机组叶片的桨距角进行控制,使风电机组的机械部分与发电机的电气部分配合,实现风电机组捕获功率与输出有功功率的实时平衡,进而通过改变气动效率来控制风电机组的有功功率输出,从而达到提高风能利用效率及改善供电质量的目的。
1.3 风电场拓扑
图3、图4分别展示了风电场集中式与分布式拓扑。在集中式风电场中,各个风电机组单独与中央处理器进行通信,因此随着风电场规模增大,中央处理器的计算和通信负担随之激增,因此集中式风电场对中央控制器要求较高,且由于风电场只有一个中央处理器,一旦出现损坏将导致风电场无法正常运行,不利于风电场的稳定运行。

图3 集中式风电场拓扑
Fig.3 Centralized wind farm topology
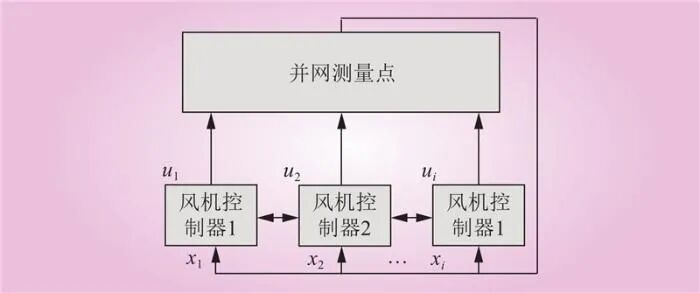
图4 分布式风电场拓扑
Fig.4 Distributed wind farm topology
在分布式风电场中,各个风电机组只需要和相邻机组进行通信,这大大减轻了计算和通信负担,降低了通信所需成本,为风电场提供了良好的可扩展性,同时当某个风电机组出现突发故障时,整个风电场不会因此瘫痪,而是能够快速调整,由剩余风电机组共享功率空缺,重新进行功率分配,保持运行,因此风电场分布式结构也增强了风电场的适应性和鲁棒性,保证了风电场的稳定运行。
02
风电场分布式拥塞控制方法
首先,本文采用分布式一致性算法来估计风电机组的功率增量成本的平均值。以某个含12台风电机组的风电场为例,关联矩阵B12×12中:bij(i,j=1,⋯,12)表示风电机组i、j之间是否进行通信,若bij=1,则表示第i个风电机组接收来自第j个风电机组的数据,若bij=–1,则表示第j个风电机组接收来自第i个风电机组的数据,否则,不进行通信。从关联矩阵可以看出,每台风电机组都只和水平或垂直相邻的风电机组进行通信,这有效避免了每台风电机组与控制中心频繁地传递功率增量成本,进而减轻了通信负担。
每台风电机组通过与少数风电机组进行邻居通信,在本地获得平均功率增量成本的估计值,即
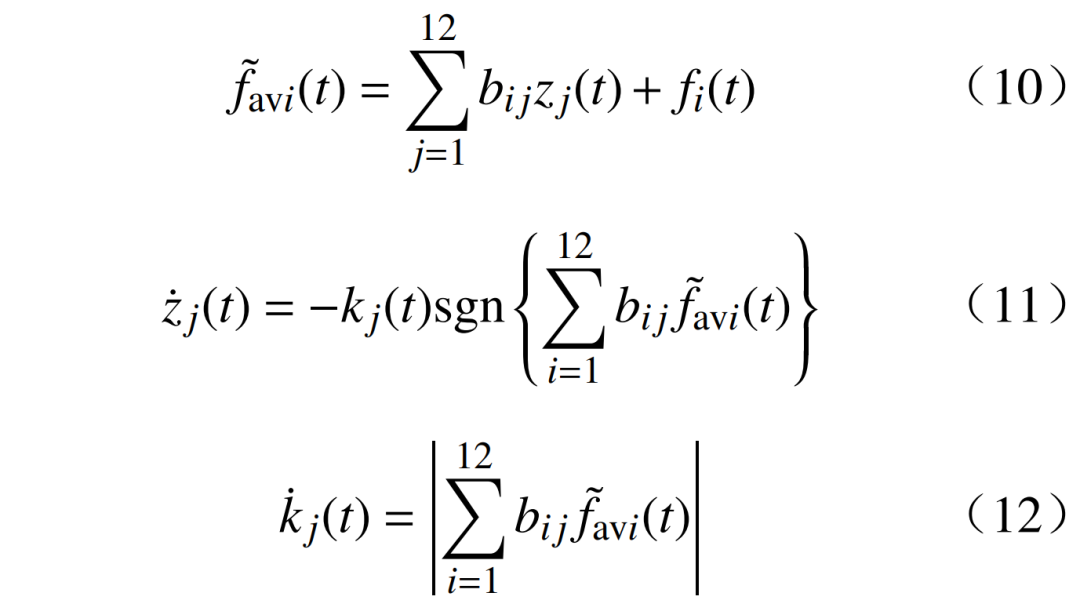
式中:
为第i个风电机组在本地获得平均功率增量成本的估计值;bijzj(t)为通信链路的内部估计器状态;fi(t)为第i个风电机组的功率增量成本;kj(t)为自适应增益。
其次,本文基于拥塞控制的思想,引入了拥塞指数。在分布式一致性获得平均功率增量成本的估计值后,计算得到本地拥塞指数为

式中:c2i为第i个风电机组的本地拥塞指数;Pei为第i个风电机组的输出功率;fi为第i个风电机组的功率增量成本;fav为所有风电机组的功率增量成本的平均值。
当c2i<1时,说明第i个风电机组的功率增量成本小于平均值,根据式(13),该风电机组将增大其输出功率,反之,将会降低输出功率。因此,在风电机组之间共享功率指令,使所有风电机组的功率增量成本收敛于平均值,以此来实现风电场功率的最优分配。
图5展示了风电场功率分配的流程,控制中心将全局拥塞指数c1广播至每台风电机组,每台风电机组计算得出功率增量成本,并由分布式一致性算法通过邻居通信得出平均功率增量成本的估计值,进而计算得出本地拥塞指数和功率参考。
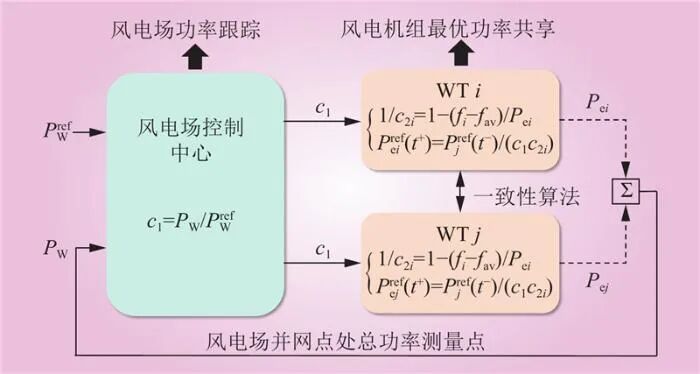
图5 基于分布式拥塞控制的风电场功率分配流程
Fig.5 Wind farm power allocation process based on distributed congestion control
图5中,控制中心广播至每台风电机组的全局拥塞指数c1是风电场输出功率与参考功率的比值,即

式中:PW、
分别为整个风电场的输出功率和快速频率调节的功率参考。
根据式(14)可以实现风电场的功率跟踪。当c1<1时,说明风电场的输出功率没有达到功率需求,每台风电机组都有增大输出功率的趋势,反之,风电机组将降低输出功率。因此,c1收敛于1,表明整个风电场的输出功率等于快速频率调节的指令。
第i个风电机组的参考功率为

式中:

为第i个风电机组的参考功率;Peu(t−)为第i个风电机组的输出功率。
结合式(13)~(15),可以得出所有风电机组的功率参考之和等于风电场的快速频率调节指令,即

式中:n为风电机组的数量。
风电机组的功率增量成本fi由

2个部分构成。
量化了桨距角变化对风电机组的损坏。由于风电机组的叶片具有一定的使用周期,频繁的桨距角变化容易对变桨距控制装置造成严重的机械磨损。因此,通过设计成本函数

,对桨距角的变化进行动态控制,尽量减少风电机组的机械磨损。

量化了转子转速变化对风电场功率跟踪性能的影响。当转子转速过低时,风电机组切换到MPPT模式进行转速恢复,这种控制模式的切换可能会引起风电机组输出功率的突变,从而影响风电场输出功率跟踪性能。尤其是在功率较大的情况下,这种突变的功率缺额需要由其他风电机组来承担,可能会导致连锁反应,最终造成功率跟踪效果不佳甚至失效。因此,为避免转子转速下降过快引发控制模式的切换,设计成本函数为
式中:
为第i个风电机组的桨距角潜在变化量;
为风电机组最小转子转速;dβi/dPei和dωri/dPei分别为桨距角和转子转速对第i个风电机组输出功率增量的灵敏度;Qβ、Qω为权重因子,考虑到避免转子转速下降过快引发控制模式的切换是最重要的目标,因此取值时令Qω大于Qβ,并通过仿真模拟,根据选取的风机模型参数来优化和确定权重因子,分别取0.01和0.09。
和dβi/dPei符号相同时,根据式(17),第i个风电机组的输出功率有减小的趋势,进而减缓桨距角的变化;反之,当二者符号相反时,意味着功率增量会减缓桨距角的变化,并且此时成本函数

是负值,风电机组的输出功率有增大的趋势,确实能够减缓桨距角的变化。同时,由式(17)可知,转子转速和输出功率变化趋势相反,因此dωri/dPei始终是负值。由式(17)不难看出,当转子转速与最小值接近时,
会急剧增加,使得输出功率显著降低,以此来避免转子转速继续下降。否则,当转子转速与其最小值距离较远时,
接近于0,对风电场的功率分配影响较小。
03
仿真结果与分析
为验证本文采用的分布式拥塞控制方法的鲁棒性和功率指令跟踪及分配性能,搭建了一个具有12台风电机组的风电场,并引入了集中式有功功率分配方法进行对比实验。为了简化分析,假设风速恒定,设置9 m/s、9.5 m /s、10 m/s 3种风速,随机施加给风电机组,假设每台风电机组具有相同的参数,如表1所示。图6展示了风电场分布式结构的拓扑。
表1 风电机组参数
Table 1 Wind turbine parameters
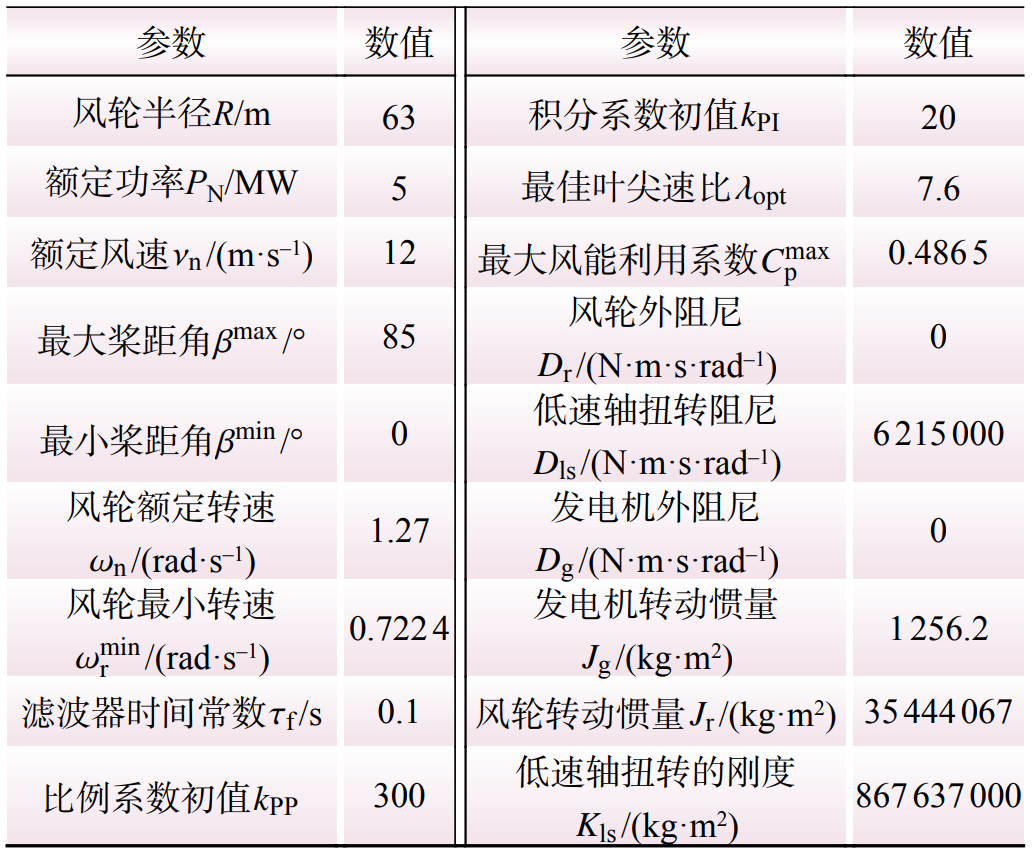
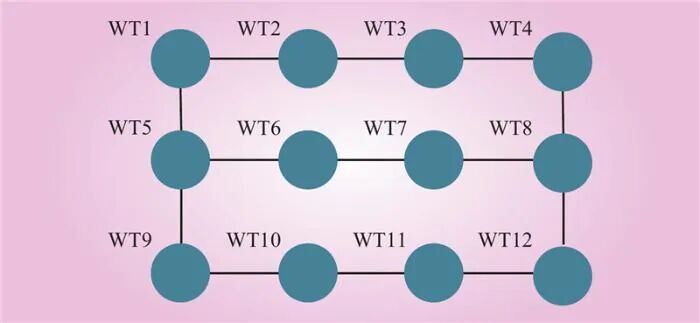
图6 具有12台风电机组的风电场分布式拓扑
Fig.6 Distributed wind farm topology with 12 wind turbines
3.1 风电机组间功率共享性能
本文所采用的方法有望优化风电机组间的功率共享,以最小化功率跟踪的成本。成本函数与桨距角β的变化紧密相关。由于部分风电机组的桨距角变化曲线重合,此处选取2台风电机组,对比所提方法与集中式方法下功率跟踪过程中桨距角的变化,如图7所示,可以看出分布式拥塞控制下的桨距角的变化量明显小于集中式控制。因此,验证了分布式拥塞控制能够有效减缓桨距角的调整,进而缓解对风电机组造成的机械磨损。
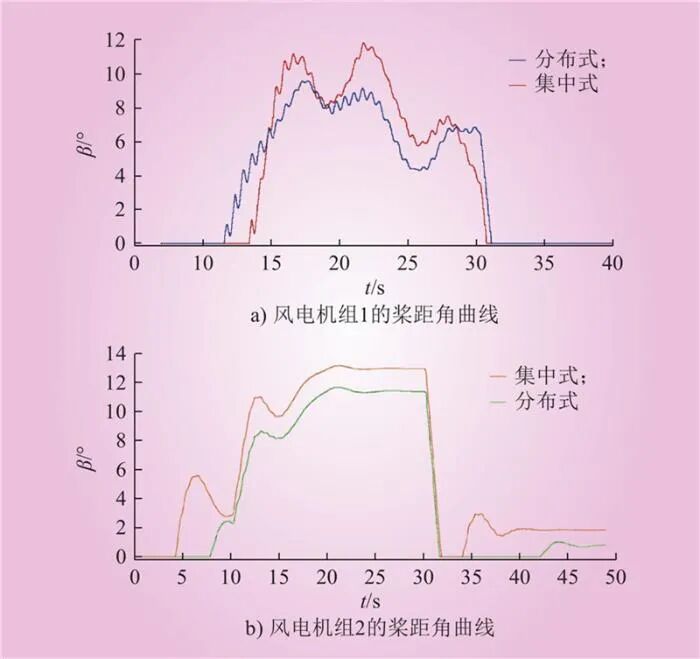
图7 功率跟踪过程中的桨距角
Fig.7 Pitch angle in power tracking process
3.2 鲁棒性验证
首先,设计并仿真模拟了风电机组切出的运行场景,选取4台风电机组分别在39 s、41 s、45 s和46 s切出,对集中式和分布式控制方法该情况下的鲁棒性进行了对比,风电场输出功率P如图8所示。可以看出,相较于集中式方法,在所采用的方法下,风电机组切出后剩余风电机组共享此变化引起的功率空缺,所需时间更短,风电场输出功率的波动更小。集中式方法下,风电场在第1台风电机组切机后,短时间内接连出现4台风电机组切出的情况,所引发的功率空缺逐渐难以由剩余风电机组承担,使整个风电场逐渐陷入瘫痪。而分布式方法下,风电机组切出对整个风电场的输出功率影响较小,剩余风电机组仍然能够正常工作,实现功率跟踪。结果表明,在所采用方法下的风电场具有更好的调频潜力,对风电机组切出场景具有更强的适应性。
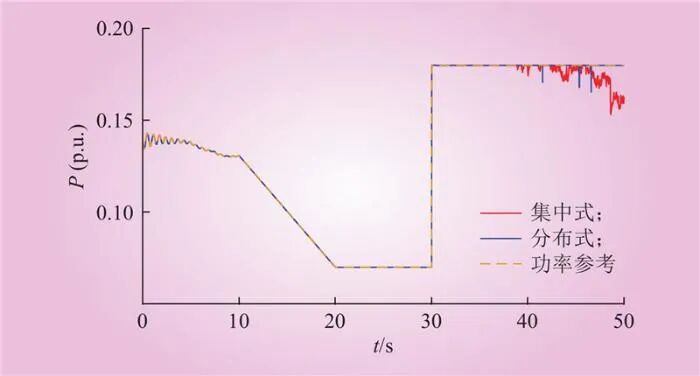
图8 风电机组切出时风电场的输出功率
Fig.8 The output power of the wind farm when the wind turbine is cut out
其次,所采用方法的控制中心将全局拥塞指数单向广播至每台风电机组,当风电机组与控制中心距离较远时,通信时延不可忽略。为了验证存在通信时延情况下的鲁棒性,观察风电场输出功率与功率指令的图线,如图9所示。
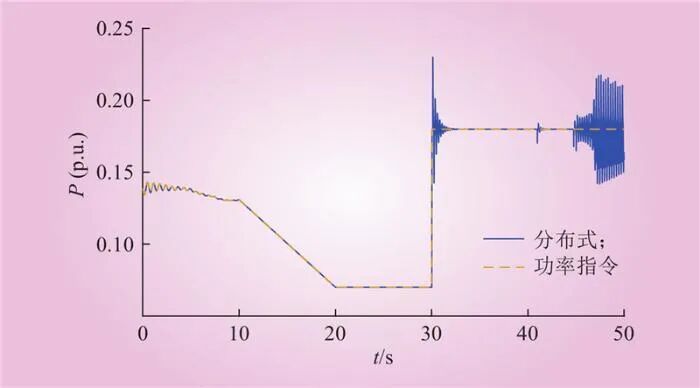
图9 风电场输出功率与功率指令
Fig.9 Wind farm output power and power instructions
图10和图11分别展示了下降阶段和阶跃阶段风电场输出功率和功率指令。由图10可知,风电场输出功率与功率指令之间存在一定的通信延迟,影响了功率跟踪性能。由图11能够明显看出存在通信延迟,并且在阶跃阶段,风电场输出功率存在振荡,42 s左右风电场输出功率产生波动,此时风电场中存在风机转速过低导致切出,并在短时间内重新分配功率,实现功率跟踪。综合来看,风电场输出功率与功率指令基本保持一致,验证了所采用方法在通信时延情况下的鲁棒性。
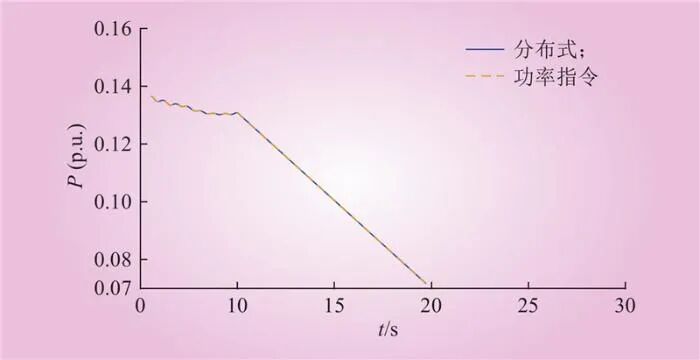
图10 下降阶段通信时延
Fig.10 Communication delay in descending stage

图11 阶跃阶段通信时延
Fig.11 Communication delay in step stage
3.3 输出功率跟踪性能
理论上来说,集中式方法下风电场的输出功率跟踪性能会优于分布式方法。图12展示了2种方法下风电场对阶跃指令的跟踪性能。以阶跃形式给定功率参考,观察比较输出功率曲线。可以看出,集中式方法下风电场输出功率的超调量更小,更快趋于稳定,这验证了理论上的结论。分布式方法能够大大减轻风电场的计算和通信负担,降低运行成本,与此同时,必然存在一些缺陷,例如功率跟踪性能下降。然而,分布式方法下输出功率的超调量在允许范围内,并且输出功率最终收敛于功率指令。

图12 阶跃参考下的输出功率
Fig.12 Output power under step reference
综合风电机组功率共享性能、鲁棒性以及功率跟踪性能3个方面,本文所采用的基于方程拥塞控制的分布式有功功率调度方法相较于传统的集中式控制方法而言,在大规模风电场的实际应用中具有更大的潜力。
04
结论
本文采用了基于分布式拥塞控制的风电场有功功率调度方法,将拥塞控制的思想与分布式一致性算法结合,并引入了成本函数,主要结论如下。1)通过分布式一致性算法简化了风电机组功率参考的计算,每台风电机组只须进行邻居通信,大大减轻了通信负担;2)引入了全局拥塞指数和本地拥塞指数2个参量,对每台风电机组的输出功率进行动态控制,优化了整个风电场的功率跟踪性能;3)通过成本函数和输出功率的相互作用,来减缓桨距角的调整以及避免转子速度降低过快,更好地确保了风电场的正常运作和功率跟踪性能。4)仿真结果表明,优化后的风电机组桨距角变化幅度相比集中式方法降低了20%~30%,分布式拥塞控制方法在鲁棒性、调频潜力以及降低成本方面均优于传统的集中式控制方法,同时也具有良好的功率跟踪性能。
未来将进一步研究风电机组整体的疲劳载荷,加入到成本函数的设计中,以期进一步降低风电场的运维成本。
反馈举报
声明:以上信息仅代表发布者自身观点,并不代表本平台赞同其观点,也不代表本平台对其真实性负责。
评论 0
网友评论仅供其表达个人看法,并不表明平台立场。全部评论
加载失败
总发布:2302粉丝:5
相关推荐
- 加载失败
新疆电力展-蜂巢展览
- 加载失败
- 加载失败
能源行业新闻
- 加载失败
浙江兴旺宝明通网络有限公司
- 加载失败
能源资讯
- 加载失败
- 加载失败
旧能新能都是能
- 加载失败
- 加载失败
旧能新能都是能
- 加载失败





